Descartes is a ROS-Industrial project that performs path-planning on under-defined Cartesian trajectories. It uses trajectory points, robot models, and planners to generate a joint-trajectory that complies with the constraints of a given process. Trajectory points define an individual point in time along a path, robot models define the physical characteristics of a robot that must complete a given trajectory, and planners are responsible for finding valid and optimal solutions through a sequence of trajectory points for a given robot model. Each of these major components has a separate package which provides reference implementations. More information can be found in the ROSCon 2015 talk by Shaun Edwards entitled, “The Descartes Planning Library for Semi-Constrained Cartesian Trajectories”
ROS Link: http://wiki.ros.org/descartes
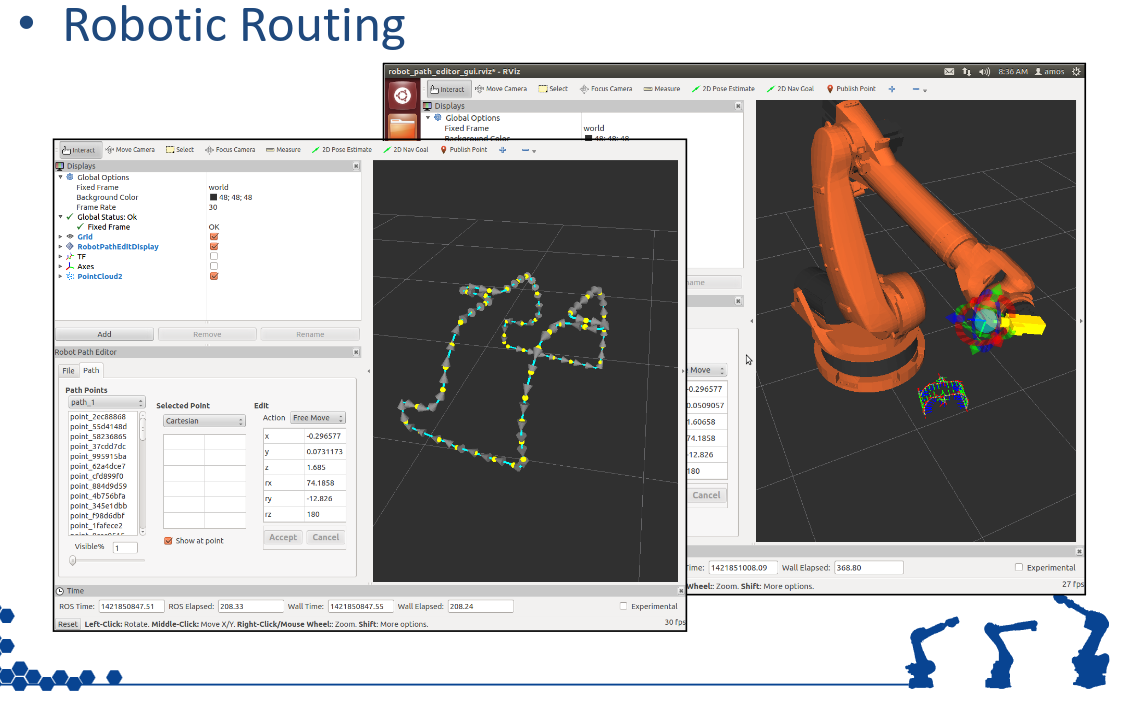
Descartes planning library for semi-constrained trajectories • Requirements – Generate common sense plans
– Find easy solutions fast, hard solutions with time
– Handle hybrid trajectories (joint, Cartesian, specialized points)
– Fast re-planning/cached planning
Key Features
Descartes, as a path planning library, is often compared to MoveIt. However, it differs from MoveIt in several key ways:
-
Cartesian Planning: While MoveIt plans free space motion (i.e. move from A to B), Descartes plans robot joint motion for semi-constrained Cartesian paths (i.e. ones whose waypoints may have less than a fully specified 6DOF pose).
-
Efficient, Repeatable, Scale-able Planning: The paths that result from Descartes appear very similar to human generated paths, but without all the effort. The plans are also repeatable and scale-able to the complexity of the problem (easy paths are planned very quickly, hard paths take time but are still solved).
-
Dynamic Re-planning: Path planning structures are maintained in memory after planning is complete. When changes are made to the desired path, an updated robot joint trajectory can be generated nearly instantaneously.
-
Offline Planning: Similar to MoveIt, but different than other planners, Descartes is primarily focused on offline or sense/plan/act applications. Real-time planning is not a feature of Descartes.
Installation
Install all ROS dependences
https://github.com/ros-industrial-consortium/descartes
https://github.com/ros-industrial-consortium/descartes_tutorials/
https://github.com/ros-industrial/industrial_core
https://github.com/ros-industrial/abb
Running
roslaunch descartes_tutorials setup.launch
rosrun descartes_tutorials tutorial1
Robot ABB will execute a line by using Descartes planning
What are the advantages of descartes’ path planning over other planners
The advantages of Descartes’ path planning over other planners include:
-
Semi-Constrained Cartesian Paths: Descartes plans robot joint motion for semi-constrained Cartesian paths, allowing for planning in scenarios where waypoints may have less than a fully specified 6DOF pose
-
Efficient and Repeatable Planning: The paths generated by Descartes are efficient, repeatable, and scalable to the complexity of the problem. They resemble human-generated paths without the same level of effort
-
Dynamic Re-planning: Descartes maintains path planning structures in memory, enabling the generation of an updated robot joint trajectory nearly instantaneously when changes are made to the desired path
-
Offline Planning Focus: Descartes is primarily focused on offline or sense/plan/act applications, making it suitable for applications where real-time planning is not a requirement
-
Path Optimization and Collision Avoidance: Descartes offers path optimization, collision avoidance, and a plug-in architecture, making it suitable for various robotic applications.
These advantages position Descartes as a suitable choice for applications requiring efficient, repeatable, and scalable path planning in semi-constrained Cartesian environments, where real-time planning is not a necessity