-
▪
Manipulation Research:
Develop and optimize algorithms for
Imitation Learning (ACT, Diffusion),
advanced motion planning (RRT, trajectory optimization),
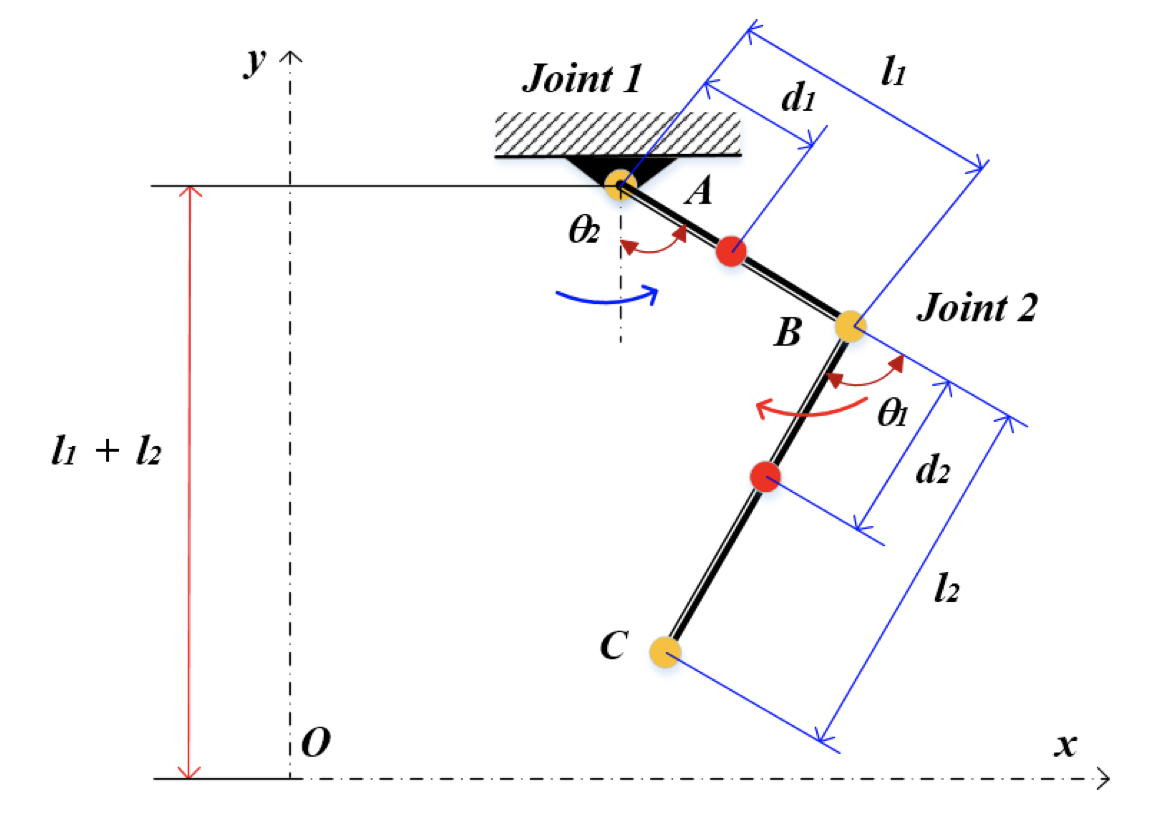
inverse kinematics,
and AI-driven perception including SLAM and multimodal sensor fusion.
-
▪
Machine Learning & AI Models:
Build and deploy machine learning models for predictive maintenance,
anomaly detection, object recognition, pose estimation, and task automation.
Utilize modern AI pipelines including deep learning, transformers,
reinforcement learning, and foundation models tailored for robotics applications.
-
▪
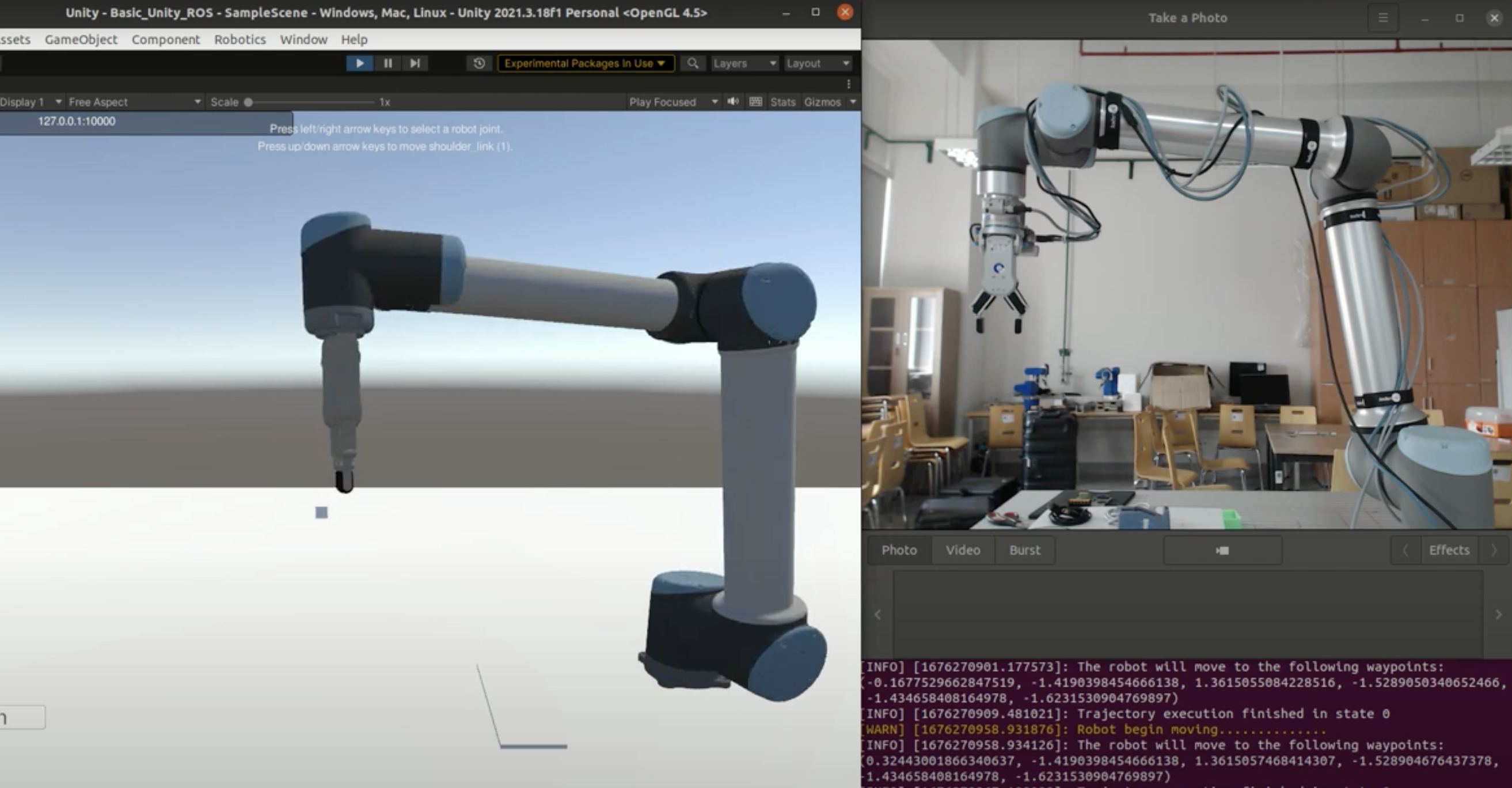
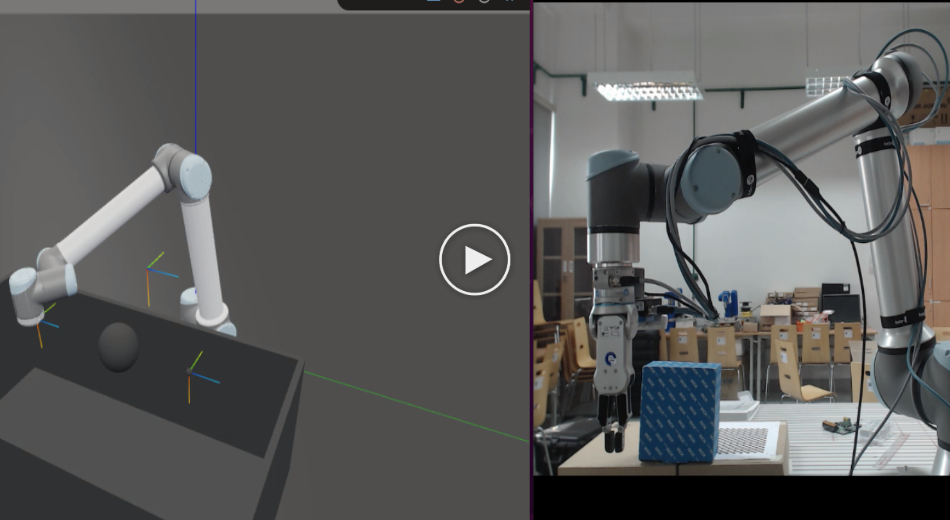
Simulation & Digital Twin:
Configure high-fidelity Digital Twin environments to validate robotic behaviors,
system stability, control robustness, and full mission workflows from simulation to deployment.
-
▪
System Design:
Architect robotics software systems using middleware like
ROS/ROS2,
integrated with simulation tools such as Gazebo, IsaacSim, and high-fidelity Digital Twin pipelines.
-
▪
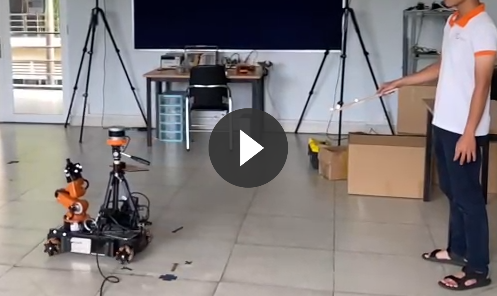
Mobile Robotics:
Develop autonomous navigation stacks, including mapping, localization,
obstacle avoidance, and path planning for AMRs, AGVs, and outdoor UGV platforms.
Integrate sensor suites such as LiDAR, GPS, IMU, and stereo/depth cameras
to achieve robust autonomy in dynamic industrial environments.
-
▪
Integration:
Interface specialized hardware with industrial robots
UR and key components
(LiDAR, depth cameras, actuators, embedded systems)
via middleware such as ROS/ROS 2 and real-time communication bridges.
Technical Capabilities
Programming & Frameworks
Core development in low-level and high-level languages for robotics and AI.

Lab Tutorials & Curriculum
- Robotics and Autonomous Systems (ROS, Pytorch)
- Embedded Intelligent System (ROS, OpenCV)
- Microcontroller / Digital Signal Processing
- Robotics Workshop (CAD and PCB Design)
Hands-on Hardware Experience
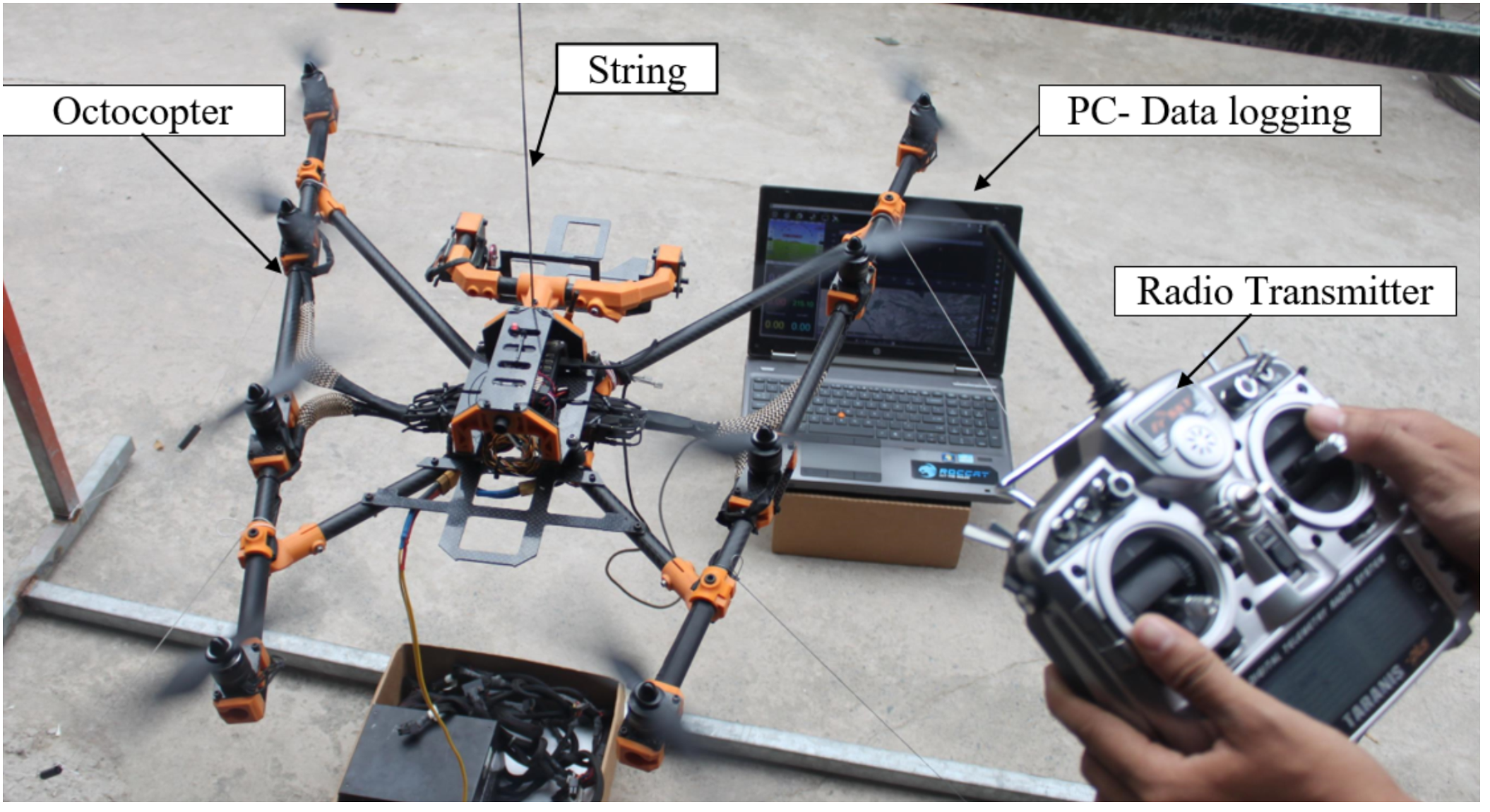
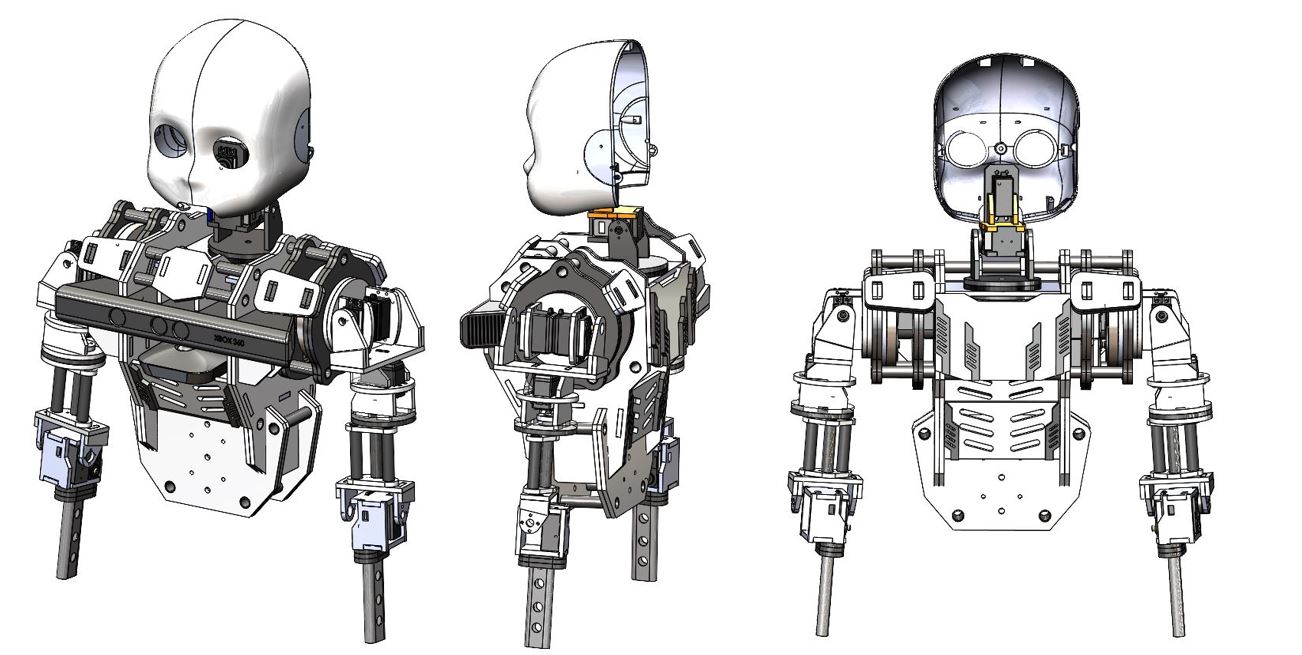
- Robot Platforms: UR10e, Kuka Youbot, Turtlebot 3, NAO, DJI Drone.
- Sensors: Velodyne VLP-16, IMU-Xsens Mti-30, Intel Realsense, SICK Lidar.
- Embedded Computers: Nvidia Jetson family, Raspberry Pi, NUC, Arduino.
- Actuators: Servo motors, linear actuators, motor drivers.
ARMI V-Research Model
The ARMI V-Research Model is a modern adaptation of the classical V-Model,
redesigned for autonomous robotics and machine intelligence workflows.
It aligns verification (left side) with
validation (right side), ensuring that
every research activity—from requirements, system design, perception algorithms, ML model pipelines,
to field testing—is tested against measurable criteria.
This model guides ARMI Lab in developing safe, reliable, and high-performance robotic systems using
digital twins, simulation-driven development, ML lifecycle management, and continuous
sim-to-real improvement.
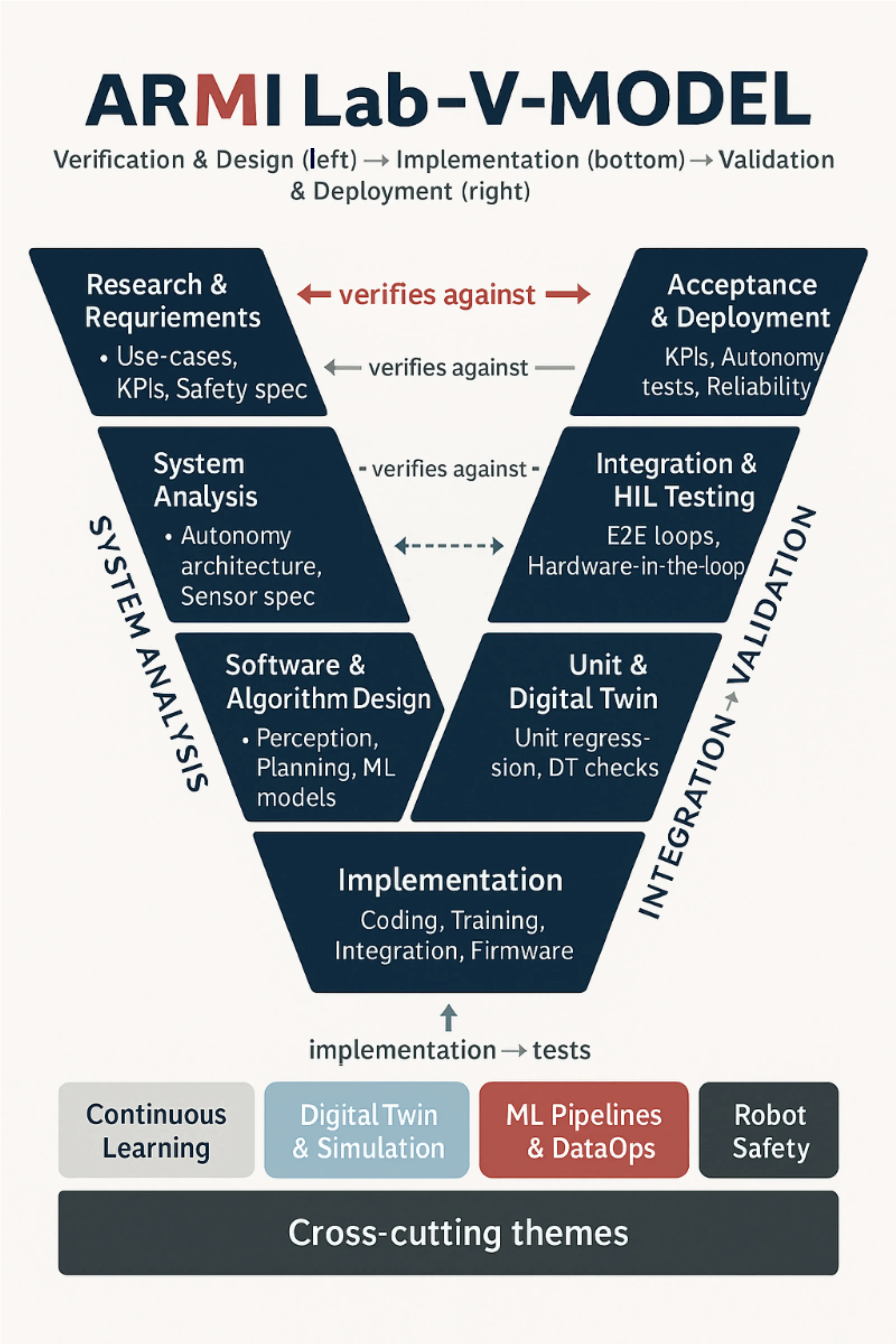
The model emphasizes four key principles:
-
Simulation-first development using digital twins
(Unity, Isaac Sim, Gazebo) for safe testing, rapid iteration, and synthetic data generation.
-
Integrated ML lifecycle driving perception,
planning, and decision-making modules through continuous training, monitoring, and model validation.
-
Hardware-in-the-loop (HIL) and
system-in-the-loop validation to ensure robust
sim-to-real transfer and safety-critical performance.
-
Full verification & validation alignment so that
research requirements, algorithms, and system behaviors always map to measurable real-world tests,
acceptance KPIs, and field trials.
This V-Research framework ensures that ARMI Lab produces scalable robotic technologies
with strong scientific rigor, repeatability, and industrial-grade robustness — from
early concept development to deployment in real autonomous robots.